-
应用事例02服务机器人
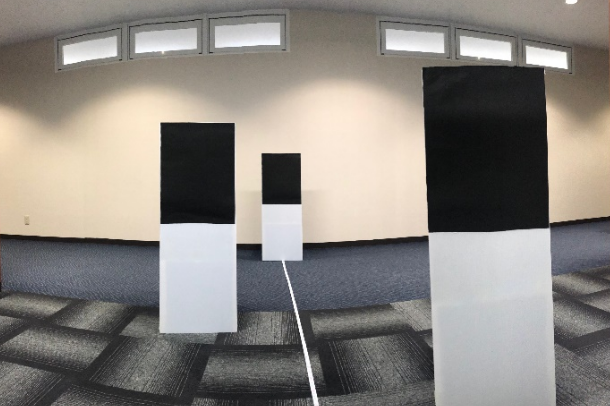
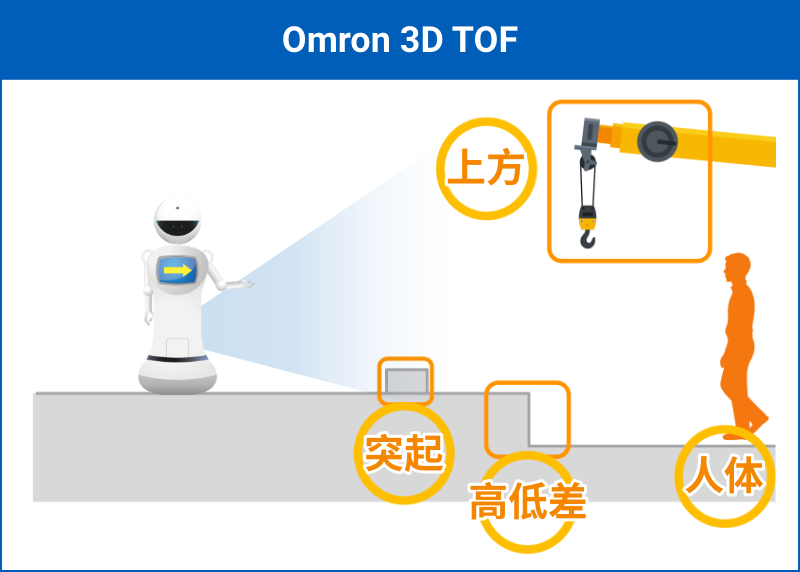
行进方向上的障碍物3D距离测量
适用型号3D TOF传感器模组: B5L-A2S-U01-010 -
 障碍物/高低差的检测
障碍物/高低差的检测
服务机器人的障碍物检测一般用于传统2D LIDAR、光电传感器、超声波传感器等。
但是,该些情况下的测量区域都有限制,因此而存在因障碍物、高低差检测不完善而导致的碰撞、跌落风险。
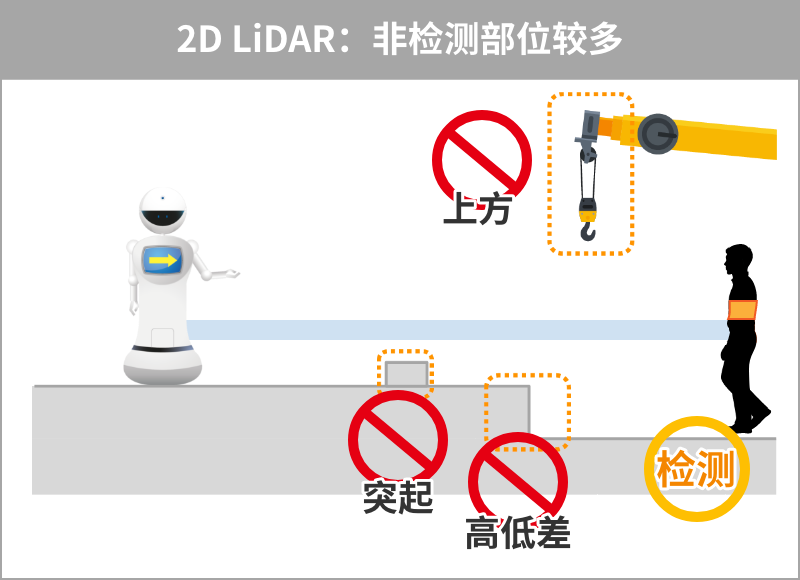
- 2D LIDAR时
- 由于采用2D测量方式,所以无法检测固定于上方的障碍物或下方的地面高低差等。
- 超声波传感器时
- 检测区域狭窄。
- 光电位移传感器时
- 检测区域狭窄。
- 近距离时因高反射率物体的信号饱和、远距离时因低反射率物体的信号微弱而无法检测。
- 即使在室内,也会因从窗外照射进来的阳光而使距离数据精度下降。
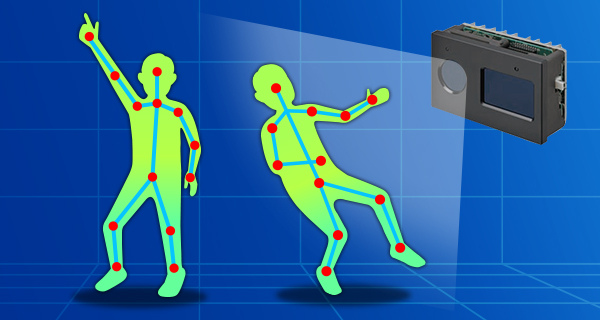
 通过3D距离测量的障碍物及高低差检测,有效防止碰撞或跌落
通过3D距离测量的障碍物及高低差检测,有效防止碰撞或跌落
- 本传感器可采用Time Of Flight方式执行3D距离测量。
基于3D距离数据,在上下、左右的广泛范围内对障碍物或高低差执行稳定检测,有效防止服务机器人的碰撞。
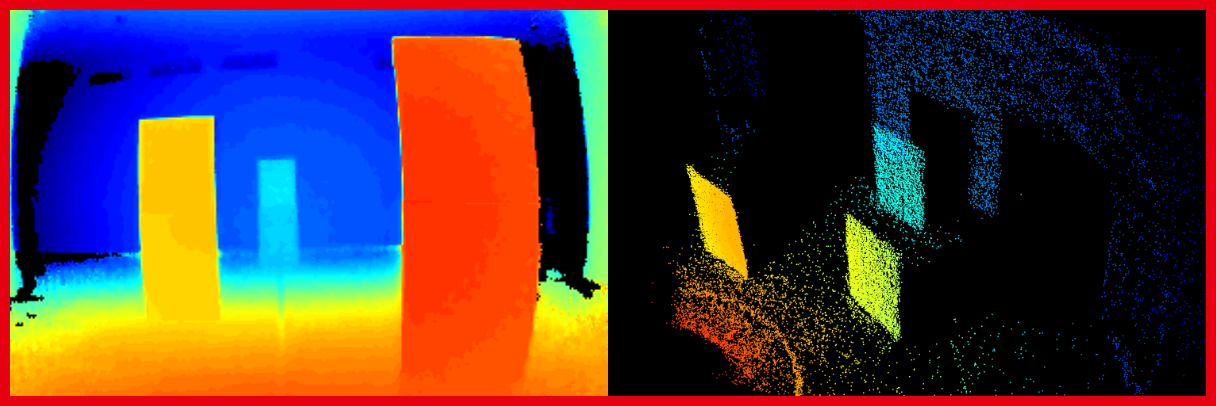
- 可通过专用处理(HDR功能),以从近到远的距离对低反射率至高反射率的检测物体执行距离测量。
- 即使在室内,也可能会受到从窗外照射进来的阳光影响。
本传感器强化了抗阳光性能*,在10万勒克斯范围内可放心使用。
 *何谓抗外部干扰光
*何谓抗外部干扰光
其他应用事例
-
AMR
服务机器人
-
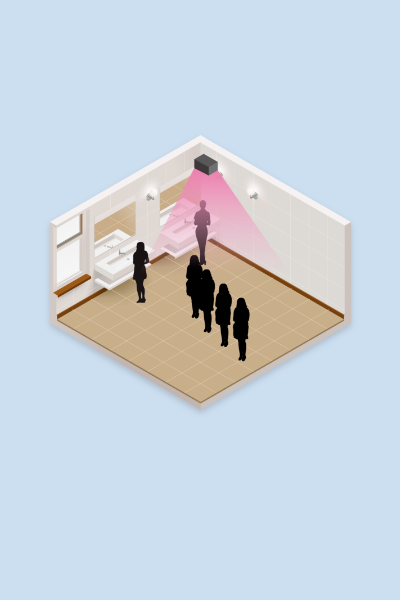
室内的人数计数
护理/看护